
Wenn die Biene einer Spirale näher kommt, dann ändert sich das Bild wie auch beim Schachbrettmuster oder bei den Ringen und die Biene landet ganz normal. Wenn sich die Spirale aber dreht, dann scheint sie ja beim Anflug entweder schneller oder langsamer größer zu werden, je nachdem, wie herum sich die Spirale dreht. Und siehe da, die Bienen nähern sich dann ihrem Ziel entweder mit überhöhter Geschwindigkeit (rechts) oder deutlich zu langsam (links). Aufgetragen ist jeweils die Geschwindigkeit gegen den Abstand, die Farbe gibt die Drehgeschwindigkeit der Spirale an (Schwarz: keine Drehung, rot: schnellste Drehung):
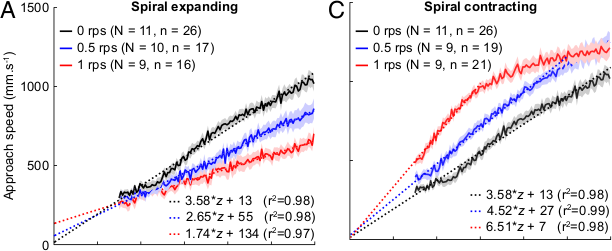
Aus Baird et al., s.u.
Berechnet man aus den Daten (das paper enthält auch ein einfaches mathematisches Modell des Ganzen, ich gebe aber zu, dass ich mir das nicht im Detail angeguckt habe), wie schnell der Biene die Vergößerung des Musters erscheint, dann ergibt sich für alle Fälle immer ein etwa konstanter Wert:
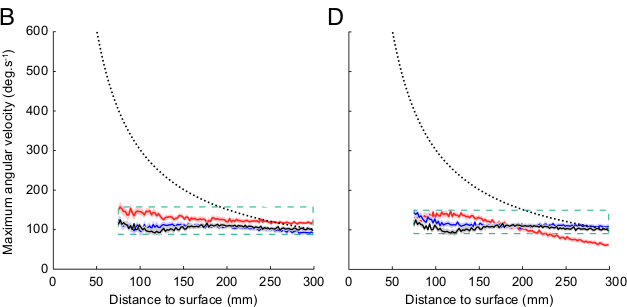
Aus Baird et al., s.u.
Aufgetragen ist jeweils die von der Biene wahrgenommene (Winkel-)Geschwindigkeit der Mustervergrößerung. Die gepunktete Linie gibt an, wie sich das Muster vergrößern würde, wenn die Biene mit konstanter Geschwindigkeit fliegen würde; dann wird das Muster beim Näherkommen immer größer, bis es das gesamte Gesichtsfeld ausfüllt.
Die Bienen fliegen also so, dass die Vergrößerung des Musters, das sie beim Anflug sehen, eine konstante Geschwindigkeit hat. Damit werden sie beim Anflug automatisch langsamer, und zwar ohne dass sie den Abstand zu ihrem Ziel kennen müssen; die Geschwindigkeit wird automatisch reduziert, je näher die Biene dem Ziel kommt. Dieser simple Trick könnte eines Tages auch für Flugroboter wie zum Beispiel für Roboter-Bienen (Bild ist leider nicht frei verfügbar) oder andere Fluggeräte nützlich sein.
Vielleicht können die Flugführer also tatsächlich etwas von den Bienen abgucken.
PS: Ich merke gerade, dass Arbeiter-Bienen ja immer weiblich sind. Deswegen habe ich den Titel nochmal editiert…
Emily Baird, Norbert Boeddeker, Michael R. Ibbotson, and Mandyam V. Srinivasan
A universal strategy for visually guided landing
www.pnas.org/cgi/doi/10.1073/pnas.1314311110

Kommentare (4)