
Wenn eine Spinne durch eure Wohnung krabbelt, dann setzt ihr sie ja sicherlich mit freundlichen Worten vor die Tür (bei uns steht immer ein Fangglas auf der Fensterbank, damit man nicht lange suchen muss). Aber es lohnt sich vielleicht, der Spinne ein wenig beim Krabbeln zuzusehen, bevor ihr das tut . Was tut eine Spinne eigentlich mit ihren acht Beinen? Gibt es da auch Gangarten wie Schritt, Trab und Galopp? Heute schauen wir mal ein wenig auf das Spinnengekrabbel.
Eine kleine Warnung vorweg: es gibt über 30000 Spinnenarten auf der Welt (zu vergleichen mit etwas mehr als 5000 Säugetierarten, also schon eine ziemliche Menge.) Natürlich darf man nicht annehmen, dass das was, für die Zitterspinne in der Badezimmerecke gilt, auch bei jeder Vogelspinne genauso ist. Und noch eine zweite Warnung: Obwohl ich mich auch mal in der Forschung ein wenig mit Biomechanik beschäftigt habe, ist das Laufverhalten von Spinnen wahrlich nicht mein Fachgebiet. Ich habe ein paar Veröffentlichungen zum Thema gelesen und gebe hier das wieder, was ich da gelernt habe, aber falls ihr morgen eure Master-Prüfung in Biomechanik macht, verlasst euch besser nicht zu 100% auf das, was ich hier schreibe…
Das Laufen von Spinnen ist übrigens nicht einfach Grundlagenforschung (obwohl natürlich Grundlagenforschung auch enorm wichtig ist), sondern hat auch direkte Anwendungen im Bereich der Robotik: Laufroboter mit 6 oder 8 Beinen haben den Vorteil, sehr stabil zu sein, und um zu sehen, wie man die am besten steuert, kann man sich natürlich auch mal angucken, was 400 Millionen Jahre Evolution so auf die Beine gestellt haben.
So, nach dieser langen Einführung schauen wir uns jetzt mal eine Spinne in Aktion an. Dieses schöne Video hier zeigt sehr schön, wie eine Standard-Gangart einer Spinne funktioniert, ich empfehle, die Geschwindigkeit beim Angucken auf 0,25-fach zu drosseln:
Wie ihr sehen könnt, bewegen sich die vorderen vier und die hinteren vier Beine sehr ähnlich. Wenn wir die Beine von vorn nach hinten mit 1-4 durchnummerieren und die Buchstaben R und L für die Seite nehmen, dann sind immer R1 und L2 gleichzeitig, ebenso R3 und L4, danach wird das ganze gespiegelt. Schauen wir nur auf die vorderen vier Beine (L1/R1+L2/R2), dann haben wir also links-vorn und rechts-hinten gleichzeitig, ebenso rechts-vorn und links-hinten.
Falls ihr euch mit Pferden auskennt, dürftet ihr diese Gangart kennen: Ein Trab.

By No machine-readable author provided. Patrick Edwin Moran assumed (based on copyright claims). – No machine-readable source provided. Own work assumed (based on copyright claims)., CC BY-SA 3.0, Link
Beim Trab haben wir genau dieses Bewegungsmuster, die Spinne macht das nur vorn und hinten gleichzeitig. Wenn man also zwei Pferde hintereinander in ein Spinnenkostüm stecken würde, hätte man eine ganz gute Idee davon, wie diese Gangart funktioniert.
Schaut man etwas genauer hin, ist es aber doch ein wenig komplizierter [Wang et al., Referenz s.u.]. Als Beispielspinne schauen wir uns eine an, die in der Arbeit “Ornithoctonus huwena” heißt – allerdings sagt Wikipedia, dass das nicht mehr der korrekte Name ist und dass die heutzutage “Cyriopagopus schmidti” heißen sollte. Umgangssprachlich nennt man sie “chinese bird spider” (“chinesische Vogelspinne”), was aber nicht eindeutig ist, denn es gibt mehrere Arten, die so heißen. Spinnentaxonomie ist anscheinend ziemlich kompliziert, aber heute interessiert uns ja eher die Biomechanik. So sieht so eine chinesische Vogelspinne aus:

By Popolon – Own work, CC BY-SA 4.0, Link
Das folgende Bild zeigt eine detaillierte Analyse der Bewegung der Spinne. Betrachte erst mal die beiden oberen Bilder: Ganz oben sehen wir 8 Momentaufnahmen der Spinnenbewegung, darunter wann welches Bein den Boden berührt. Leider hat das Bild in der Originalarbeit zwei Fehler – zum einen ist die vertikale Linie für Zustand 8 im Bild falsch eingezeichnet, zum anderen fehlt eine Linie für das Bein L1. Ich habe beides mal grob (die vertikale Linie müsste wohl etwas weiter links sein) in rot nachgezeichnet. (Und ja, solche kleine Schlampigkeit kostet arme Bloggerinnen gern mal eine halbe Stunde ihrer Zeit…)
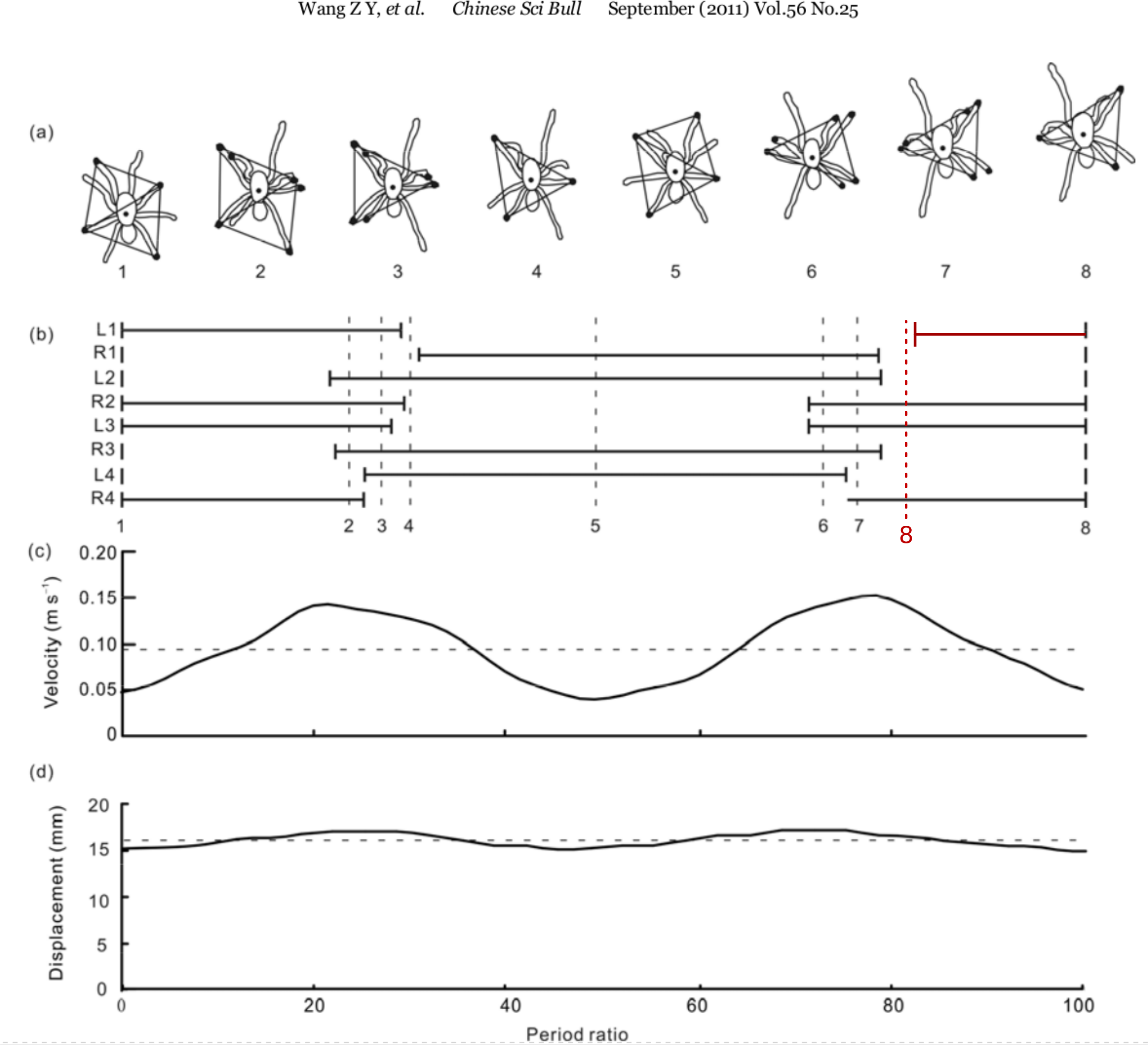
Modifiziert aus Wang et al., s.u.
Ihr seht im Bild aber sehr schön die alternierende Gangart: L1 und R2 sind gleichzeitig miteinander (sozusagen der Trab unseres vorderen Pferds), ebenso L3 und R4. Wenn man genau hinschaut, dann sieht man aber, dass L3 und R3 insgesamt mehr Bodenkontakt haben als L1/R1, weil es ein Intervall gibt, wo beide gleichzeitig den Boden berühren. Ganz identisch sind also das vordere und hintere Bein-“Quadrupel” also nicht. (Warum das so ist, sehen wir gleich noch.)
Im Teilbild c die Geschwindigkeit des Schwerpunkts – der bewegt sich also nicht konstant vorwärts, sondern wird immer etwas schneller und dann wieder langsamer. Die niedrigste Geschwindigkeit hat er immer dann, wenn eins der letzten Beine in der Mitte des Bodenkontakts ist. Auch die Höhe des Schwerpunkts (das ist das letzte Teilbild) ist nicht konstant, sondern geht etwas nach oben und unten – ähnlich wie bei uns, wenn wir gehen.
Wenn man genau hinsieht, dann hat Bein 1 (rechts und links) einen recht kurzen Bodenkontakt verglichen mit den anderen. Dieses Bein ist auch das längste. Es dient dazu, den Boden zu erkunden, weniger dazu, das Gewicht zu tragen. Das hinterste Beinpaar (Bein 4) erzeugt große Kräfte und ist der Hauptantrieb. Die mittleren beiden Beinpaare sorgen vor allem für seitliche Stabilität und tragen den Körper. Wenn man 4 Beinpaare hat, kann halt jedes seine eigene Aufgabe übernehmen, wir armen Zweibeiner müssen mit einem Beinpaar alles erledigen (deswegen fallen wir ja auch manchmal hin…).
Die untersuchte chinesische Vogelspinne hat – zumindest in dieser Untersuchung – nur eine Gangart gezeigt, wenn sie schneller läuft, dann erhöht sie einfach die Schrittfrequenz, aber nicht die Schrittlänge. Das ist anders als bei uns; wenn wir laufen, ändern wir zum einen die Gangart, zum andern werden die Schritte beim schnellen Laufen auch immer länger.
Das muss aber nicht immer so sein. In einer anderen Arbeit (Biancardi et al) wird eine südamerikanische Vogelspinne untersucht (laut paper Grammostola mollicoma, Wikipedia sagt aber, das die eigentlich Grammostola anthracina heißen sollte – ich sagte ja, das Spinnentaxonomie haarig ist). Die langsame Gangart ist bei ihr wie bei ihrer chinesischen Verwandten, aber wenn sie sehr schnell läuft, dann gibt es immer einen starken Anfangsimpuls, der die Spinne stark beschleunigt, danach bewegen sich die Beine sehr irregulär, wobei die Spinne immer langsamer wird.
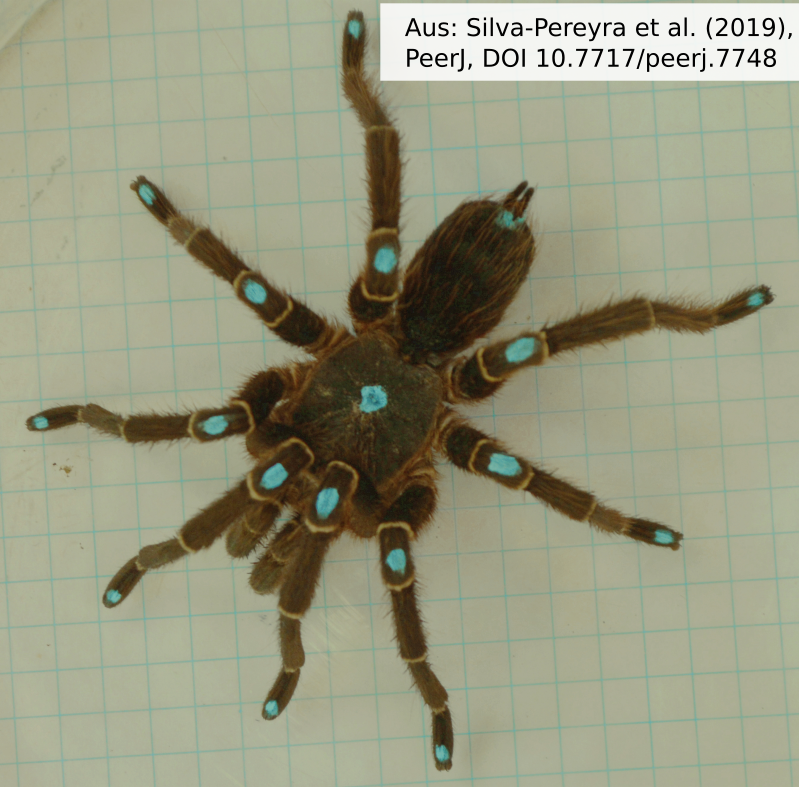
Gleich mehrere Gänge gibt es bei einer anderen südamerikanischen Vogelspinne, Eupalaestrus weijenberghi (Silva-Pereyra et al. s.u.). Aus dieser Arbeit stammt übrigens auch das Aufhängerbild des Artikels; da könnt ihr nochmal sehen, wie man eine Spinne mit Markern versehen hat, um die Bewegung der Beine genau verfolgen zu können. (Diese Arbeit ist nagelneu und ein Tweet gestern brachte mich auf die Idee, über das Thema mal zu bloggen.) Hier seht ihr drei Diagramme der Beinbewegung für unterschiedliche Fälle:
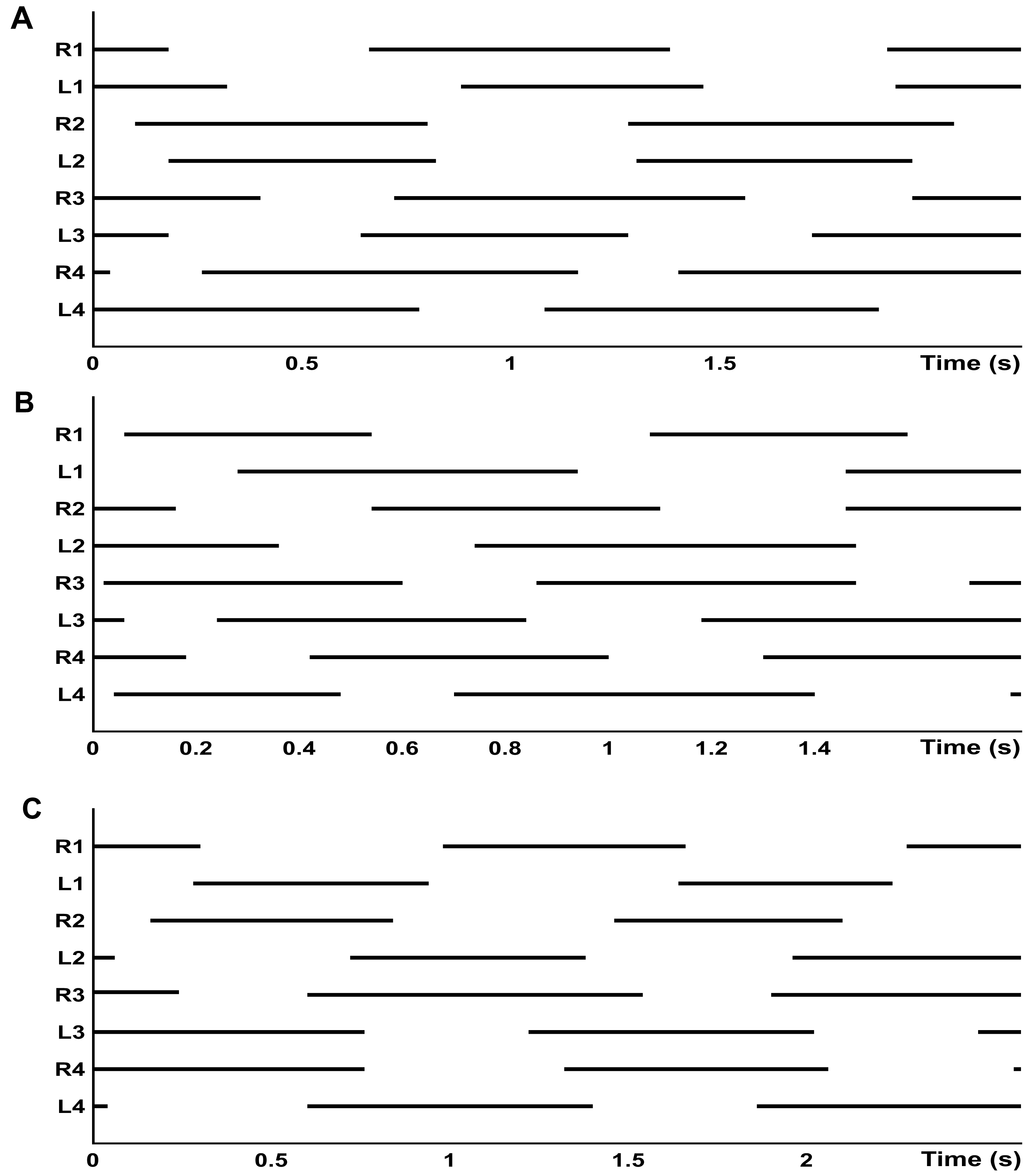
(Aus Silva-Pereyra, s.u.)
Das untere Diagramm C ist so ähnlich wie wir es kennen, L1 ist ungefähr gleichzeitig mit R2 und umgekehrt, ebenso L3/R4. Das ist also sozusagen der “normale” Doppel-Trab.
Bei Bild B sind L1 und R1 etwas gegeneinander versetzt, sind aber immer noch einige Zeit gemeinsam im Bodenkontakt. Wenn man es mit Säugetieren vergleicht, dann ist das ein Schritt – die Beine bekommen alle nacheinander Bodenkontakt. Die beiden Beine sind auch nicht ganz gleich – ihr seht, dass der Bodenkontakt von L1 eine längere und eine kürzere Phase hat. Soweit ich sehe, wird das in der Arbeit nicht weiter untersucht oder erklärt, ich kann also nichts dazu sagen, warum das so ist.
Bei Diagramm A sehen wir dagegen etwas ganz anderes: Hier werden die beiden vordersten Beine fast gleichzeitig bewegt und mit dem zweiten Beinpaar alterniert. Die Bewegung ist also eher wie bei einem springenden Affen oder Hasen, der auch mit beiden Vorderbeinen aufkommt, während die Hinterbeine in der Luft sind, und sich dann hinten abstößt. Diese Bewegungsart heißt bei Säugetieren “bound” (soweit ich sehe, gibt es dafür keinen allgemein verwendeten deutschen Begriff. Bei den Hinterbeinen sind die beiden Beine Nummer 3 auch etwa gleichzeitig, das ist aber trotzdem kein “bound”, weil das letzte Beinpaar versetzt dazu aktiv ist. Auch das ist eine Art Schritt.
Anders als Vierbeiner haben Gliederfüßer meist keine “Schwebphase”, bei der kein Bein mehr Bodenkontakt hat. (Bei Menschen oder zweibeinigen Dinos ist es so, dass die Schwebphase beim Laufen auftritt, beim Gehen dagegen nicht, das ist aber nicht die Definition von Laufenund Gehen, siehe Trex-Artikel). Ausnahmen gibt es aber, wie dieses Bild (aus Spagna et al.) zeigt:
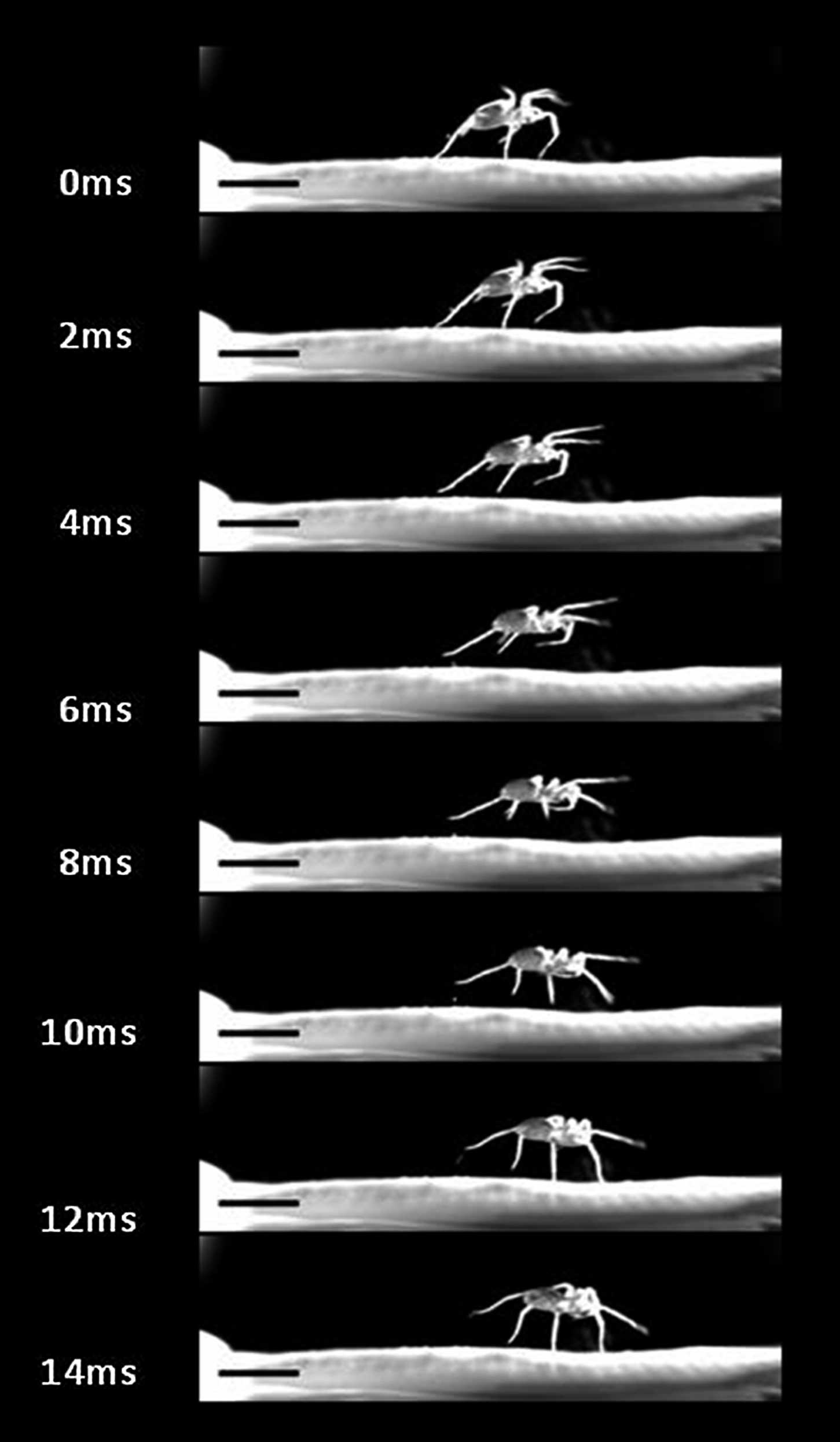
Die Springspinne, die bei mir auf der Terrasse wohnt (und immer auf mein Buch krabbelt, wenn ich im Sommer draußen sitze) hüpft noch deutlich größere Strecken und schafft mehrere Körperlängen mit einem Satz.
Alles in allem seht ihr, dass Spinnen mit ihren 8 Beinen auch entsprechend komplizierte Gangarten produzieren können (und soweit ich es sehe, gibt es noch mehr, die ich aber nicht mehr gezeigt habe). Vielleicht finden wir die ja auch eines Tages bei unseren Hausrobotern wieder, wenn sie auf 8 Beinen durch unsere Wohnung krabbeln, um den Staub aus den Ecken zu wischen.
Wang et al., Chinese Science Bulletin, September 2011 Vol.56 No.25: 2748 − 2757, doi: 10.1007/s11434-011-4584-y
Silva-Pereyra et al. (2019), PeerJ, DOI 10.7717/peerj.7748
Spagna et al.,The Journal of Arachnology 2011 39:84–91
Biancardi et al., The Journal of Experimental Biology , 214, 3433-3442.

Kommentare (31)