
Stellt euch vor, ihr seid auf dem Weg zum Bus. Beim Blick auf die Uhr merkt ihr, dass es doch schon etwas später ist als gedacht, ihr geht also etwas schneller. Dann noch schneller. Wird wohl wirklich knapp werden, also beschleunigt ihr weiter und plötzlich fallt ihr vom Gehen ins Laufen. Das tut ihr ganz automatisch ohne viel drüber nachzudenken – irgendwann kommt einfach der Moment, wo die Geschwindigkeit für’s Gehen “zu hoch” ist und man schlicht lieber läuft.
Natürlich ist klar, dass man bei sehr hohen Geschwindigkeiten schlicht nicht mehr Gehen kann – wer schon mal die Schnellgeher bei der Olympiade gesehen hat, weiß, dass die sehr komische Dinge tun müssen, um bei Geschwindigkeiten zu gehen, wo man eigentlich laufen würde. (Beispielsweise heben sie ihre Hüfte immer so an, dass die effektive Beinlänge beim Gehen vergrößert wird, weil das die Geschwindigkeit erhöht, das sieht man etwa bei diesem Video.) Aber irgendwo gibt es ja den Übergangsbereich, Geschwindigkeiten (bei uns vielleicht so bei 6-8km/h), wo man im Prinzip beide Gangarten nutzen könnte. Warum wechseln wir von der einen zur anderen?
Die gleiche Frage stellt sich natürlich nicht nur für Menschen, sondern auch für Tiere. Pferde fallen irgendwann in den Trab und dann in den Galopp, und auch das tun sie (in freier Natur) ganz von selbst.
Dass man prinzipiell bei sehr hohen Geschwindigkeiten nicht mehr geht, sondern läuft, liegt also daran, dass bei hohen Geschwindigkeiten Gehen einfach nicht mehr funktioniert – physikalisch kann man sagen, dass die Energiekosten des Gehens irgendwann zu hoch werden. Lange Zeit hat man deshalb angenommen (so habe ich es bis vor kurzem auch gedacht), dass der Übergang vom gehen zum Laufen schlicht dann passiert, wenn das Laufen energetisch günstiger wird. Es stellt sich aber die Frage, wie wir das eigentlich merken: Solange wir noch gehen, laufen wir ja nicht (wer hätte das gedacht), woher wissen wir also, dass jetzt der Moment gekommen ist, wo Laufen effizienter ist?
Bevor wir uns das im Detail anschauen, noch kurz die Antwort auf die Frage, die ihr euch vielleicht schon gestellt habt: Was ist denn eigentlich genau der Unterschied zwischen Gehen und Laufen? Beide unterscheiden sich in zwei Dingen: Zum einen ist beim Gehen das Bein gestreckt, wenn ihr in der Schrittmitte seid. Wenn der Schwerpunkt über dem Fuß ist, ist er höher, dann kippt ihr nach vorn, bis der andere Fuß euch wieder auffängt. Man spricht deswegen auch vom “Invertierten Pendel”. Diese nette Computersimulation zeigt, wie das aussieht:

By Maximilian Schönherr – Own work, CC BY-SA 3.0, Link
Beim Laufen dagegen trifft das einigermaßen gestreckte Bein auf dem Boden auf, dann knickt ihr im Knie ein und wenn der Schwerpunkt genau über dem Fuß ist, dann ist er am niedrigsten, das Bein ist maximal eingeknickt. (Damit kann man dann so lustige Dinge machen wie die Geschwindigkeit von Dinos abschätzen.) Dann stoßt ihr euch ab und springt sozusagen wieder nach oben für den nächsten Schritt.
Zusätzlich unterscheiden sich Laufen und Gehen auch noch darin, dass man beim Laufen eine Phase hat, wo kein Fuß den Boden berührt, beim Gehen dagegen hat man immer Bodenkontakt. (Es gibt allerdings eine spezielle Laufart, bei der man die Beine etwas eingeknickt lässt und immer Bodenkontakt hält, obwohl das Bein in der Schrittmitte eingeknickt wird.)
Ist es also die Energieeffizienz, die uns dazu bringt, auf dem Weg zum Bus plötzlich ins Laufen zu verfallen? Wie gesagt hat man das lange Zeit angenommen, aber es blieb dabei unklar, wie der Körper das mit der Effizienz merkt. (Es könnte natürlich sein, dass wir das als Kinder einfach lernen und dann schlicht unbewusst tun, so wie wir auch andere Dinge unbewusst machen, beispielsweise weiche Dinge mit den Schneidezähnen, harte mit den Eckzähnen abbeißen, ohne dass wir nachdenken müssen.) Eine alternative Idee ist, dass das Gehen bei hohen Geschwindigkeiten immer instabiler wird und dass wir deswegen ins Laufen verfallen, weil wir beim zu schnellen Gehen sonst möglicherweise hinfallen würden. (Ich bin mir nicht sicher, ob das genau derselbe Effekt ist, aber beim Bergabwandern merkt man ja auch manchmal, dass es besser ist, die Beine etwas einzuknicken und schneller zu gehen, als zu versuchen, langsamer zu sein.)
Wir haben also zwei Hypothesen: Der Gangwechsel wird entweder durch die Energieeffizienz oder durch die Instabilität gesteuert. Dieses Bild veranschaulicht die beiden Ideen:

(Aus Granatosky et al., Suppl. Material)
Oben ist der “cost of transport” aufgetragen: Wie viel Energie muss ich aufwenden, um ein Kilogramm einen Meter weit zu bewegen. Es gibt für jede Gangart ein Optimum, dann wird sie weniger effizient und wir wechseln zur nächsten Gangart. (Dass die Kosten pro Strecke im Optimum für alle Gangarten gleich sind, mag auf den ersten Blick überraschen – Laufen ist schließlich anstrengender als Gehen. Das liegt aber daran, dass wir bei der Anstregung natürlich den Energieaufwand pro Sekunde messen, und der ist beim Laufen höher, weil wir dieselbe Strecke in kürzerer Zeit zurücklegen und deswegen pro Sekunde mehr Energie verbraten.)
Unten dagegen ist das entsprechende Bild für die Stabilität aufgetragen: Wir wechseln die Gangart, wenn die aktuell verwendete zu instabil wird.
Wie kann man jetzt herausbekommen, was von beiden stimmt? Dazu wurden unterschiedliche Tiere auf Laufbänder gesetzt, so dass sie mit unterschiedlichen Geschwindigkeiten laufen mussten. Das Ganze passierte in einer geschlossenen Kammer, so dass man den Sauerstoffverbrauch messen und dadurch auf den Energieverbrauch zurückschließen konnte. Die Geschwindigkeit wurde langsam erhöht um zu sehen, welche Gangart die Tiere jeweils wählen und wann sie den Übergang machen. Damit ließ sich also der Energieaufwand messen.
Etwas schwieriger ist die Frage nach der Instabilität. Die wurde so gemessen, dass man die Variation der Schrittdauer angeguckt hat – wenn alle Schritte genau gleich lang sind, ist die Gangart stabil, wenn die Schrittdauer stark fluktuiert, dann fällt es dem Tier offensichtlich nicht leicht, einen gleichmäßigen Schritt zu halten, also ist das Ganze in irgendeiner Weise instabil. Das Experiment wurde mit 9 unterschiedlichen Tierarten durchgeführt, zusätzlich wurden auch noch Literaturdaten angeguckt (das bisher erste mal, dass ich die Software “Datathief” [habe ich auch schon benutzt…] in einer Veröffentlichung zitiert gesehen habe).
Beispielhaft zeige ich hier mal zwei der Datensätze aus der Veröffentlichung, nämlich die für Kapuzineraffen und Hund:
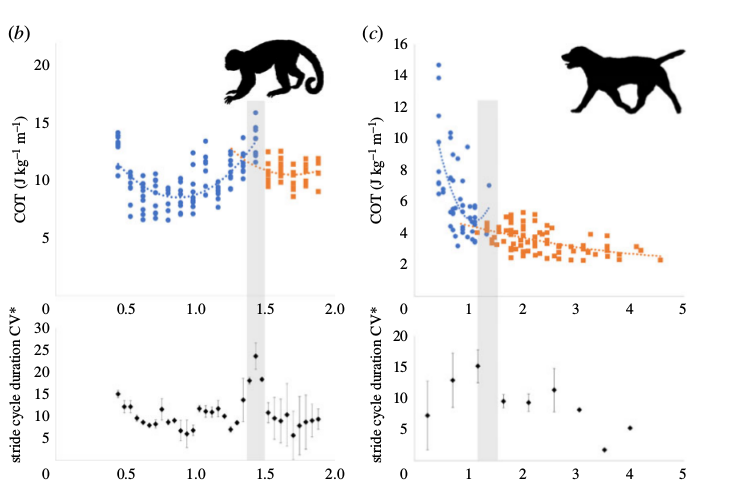
(Aus Granatosky et al.)
Oben seht ihr jeweils die energetischen Kosten aufgetragen, unten die Variation der Schrittdauer. Die Punkte kennzeichnen die Gangart, blaue Kreise stehen für Schritt, orangene Vierecke fürs Laufen (bzw. Traben).

Kommentare (87)